

Мы являемся одним из самых профессиональных поставщиков комплектующих для FA в Китае. Наша основная продукция включает серводвигатели, планетарные редукторы, инверторы, ПЛК и HMI. Мы работаем с такими брендами, как Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron и другими. Срок доставки: в течение 3–5 рабочих дней после получения оплаты. Способ оплаты: банковский перевод, аккредитив, PayPal, West Union, Alipay, Wechat и т. д.
| Элемент | Технические характеристики |
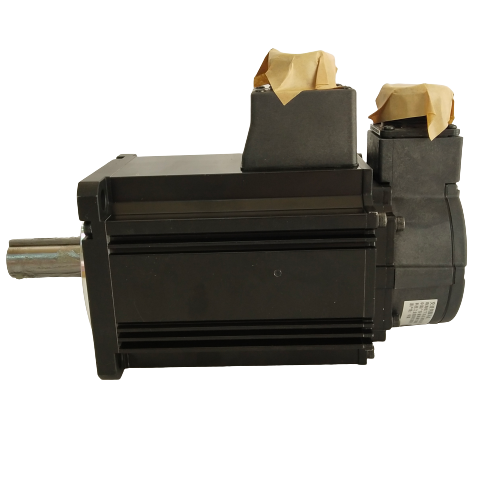
| Номер детали | MSME302GCGM |
| Подробности | Низкая инерционность, тип разъема, IP65 |
| Фамилия | МИНАС А5 |
| Ряд | Серия ММСП |
| Тип | Низкая инерция |
| Продукт специального заказа | Продукт специального заказа |
| Меры предосторожности при заказе специального продукта | Пожалуйста, избегайте поставок двигателя или оборудования, содержащего двигатель, в Японию или другие регионы через Японию. |
| Класс защиты | IP65 |
| О корпусе | За исключением вращающейся части выходного вала и соединительной штифтовой части разъема двигателя и разъема энкодера. |
| Условия окружающей среды | Более подробную информацию смотрите в инструкции по эксплуатации. |
| Размер площади фланца | 120 мм кв. |
| Размер площади фланца (единица измерения: мм) | 120 |
| Конфигурация вывода двигателя | Разъем |
| Разъем энкодера двигателя | Разъем |
| Мощность источника питания (кВА) | 4.5 |
| Характеристики напряжения | 200 В |
| Номинальная мощность | 3000 Вт |
| Номинальный ток (А (среднеквадратичное значение)) | 18.1 |
| Стояночный тормоз | без |
| Масса (кг) | 8.3 |
| Сальник | с |
| Вал | Шпоночный паз |
| Номинальный крутящий момент (Н ⋅ м) | 9.55 |
| Максимальный пиковый крутящий момент (Н ⋅ м) | 28.6 |
| Макс. ток (А (оп)) | 77 |
| Частота рекуперативного торможения (раз/мин) | Без опции: Без ограничений С опцией: Без ограничений Опция (внешний регенеративный резистор) Номер детали: DV0P4285 x 2 параллельно |
| О частоте рекуперативного торможения | Подробную информацию см. в [Описание характеристик двигателя], примечание: 1 и 2. |
| Номинальная скорость вращения (об/мин) | 3000 |
| Номинальная максимальная скорость вращения (об/мин) | 5000 |
| Момент инерции ротора (x10-4кг ⋅ м²) | 6.50 |
| Рекомендуемое соотношение моментов инерции нагрузки и ротора | 15 раз или меньше |
| О рекомендуемом соотношении моментов инерции нагрузки и ротора | Подробную информацию см. в [Описание технических характеристик двигателя], Примечание: 3. |
| Поворотный энкодер: характеристики | 20-битная инкрементная система |
| Поворотный энкодер: Разрешение | 1048576 |
Допустимая нагрузка
| Элемент | Технические характеристики |
| Во время сборки: Радиальная нагрузка в направлении P (Н) | 980 |
| Во время сборки: осевая нагрузка в направлении А (Н) | 588 |
| Во время сборки: осевая нагрузка в направлении B (Н) | 686 |
| Во время работы: Радиальная нагрузка в направлении P (Н) | 490 |
| Во время работы: осевая нагрузка в направлении A, B (Н) | 196 |
| О допустимой нагрузке | Подробную информацию см. в [Описание технических характеристик двигателя] «Допустимая нагрузка на выходном валу». |
10 Вт – 7,5 кВт, Входное питание драйвера: Напряжение постоянного тока 24 В/48 В・Переменный ток 100 В/200 В/400 В, 20-битный инкрементный・17-битный абсолютный/инкрементальный энкодер, частотная характеристика 2,3 кГц
Обеспечивает быстрое и точное перемещение. Быстрый отклик и высокоточное позиционирование.
Принят новый алгоритм«Управление с двумя степенями свободы”(2DOF) для повышения производительности и точности обработки.
В обычной модели, поскольку мы не могли регулировать отдельно управление прямой связью и управление обратной связью, другими словами, даже если мы регулируем только«Подход”прямой связи, она имела связь с«Расселение”управления с обратной связью требовалась взаимная корректировка.
-

MSMF012L1U2 Японский серводвигатель Panasonic A6 100 Вт переменного тока
-

Сервопривод Panasonic 1,5 кВт MDDHT5540
-

MSMF012L1A2 Серводвигатель Panasonic A6 100 Вт
-

Сервопривод Panasonic серии A5E мощностью 400 Вт MBDHT2510E
-

MHMJ042G1U Panasonic 400 Вт A5 серводвигатель переменного тока
-

Сервопривод Panasonic A5 MFDKTA390E




